Nawigacyjne „pimp my ride”. Tym razem odpicuję old timera. W kabinie nawigatora pojawi się sekstant. W hangarze na przeróbki czeka B-17, ale takie zmiany możesz wprowadzić do każdego samolotu w FSX. Omówię również podstawowe funkcje tego urządzenia w FSX.
Jakie samoloty przerabiać?
U mnie „klasyczny zestaw nawigacyjny” w różnej formie otrzymało kilka spośród samolotów, które w rzeczywistości miały takie wyposażenie standardowo lub w wybranej konfiguracji. Czasami jakieś gadżety montuję w samolotach, które przenosiły je jednorazowo, na potrzeby jakiegoś spektakularnego lotu lub specjalnej misji. Wśród tych ostatnich jest P-51 Mustang – wzorowany na Excaliburze III Charlesa Blaira, który historycznym myśliwcem przeleciał nad biegunem północnym nawigując z pomocą kompasu słonecznego i sekstantu.
Niejako „standardowo” pełny zestaw nawigacyjny dostają B-17, Boeing 377 Stratocruiser i PBY Catalina. Składa się z:
- sekstantu,
- kompasu słonecznego,
- astrokompasu,
- dryfomierza,
- namiernika,
- dodatku „Weatherships” obejmującego kutry pogodowe na oceanach i radiostację do namierzania ich radiolatarni.
Czasami (jeśli symuluję loty z wieloosobową załogą, w której był nawigator) takie wyposażenie dostaje też DC-3.
Ograniczony zestaw trafia do samolotów, które historycznie miały słabsze wyposażenie. Służące do symulowania lotów wczesnych wersji Boeingi 707, C-130 Hercules pozbawione są dryfomierza – nic nie znalazłem na temat wyposażenia tych samolotów w takie urządzenie. Pozostałe przyrządy są przenośne, więc można ich używać w wielu samolotach.
Czytając relacje pilotów latających w okolicach polarnych lub oglądając filmy z takich lotów widać zresztą jak piloci małych samolotów (np. DHC-6) używają sekstantów. To urządzenie do dziś jest używane w niektórych okolicznościach, choć skutecznie je wypiera nawigacja satelitarna.
To pierwsza część cyklu poradników o klasycznych (historycznych) metodach prowadzenia nawigacji. Temat proszę traktować jako rozwojowy – na tym tekście na pewno się nie skończy.
Jak można zamontować i wykorzystać sekstant?
Sekstant w FSX
Pobranie i rozpakowanie plików
W sieci dostępnych jest kilka wersji sekstantu Dave’a Bitzera i Marka Beaumonta. W tym poradniku omawiam ten pobrany z flightsim.com. W tej chwili można go pobrać klikając w ten link, ale flightsim.com ma zwyczaj zmieniać ścieżki do plików, więc jeśli link nie działa – skorzystaj z wyszukiwarki i znajdź plik – dc3_bbsx.zip (szukaj według file name, wpisanie tej nazwy pliku w polu wyszukiwania tekstowego daje inną wersję tego sekstantu).
Pobrana paczka zip zawiera:
- folder instrukcji,
- plan lotu,
- paczkę „gauge” – BB_sextant,
- plik readme,
- obrazki.
Paczkę BB_sextant należy rozpakować do folderu o tej samej nazwie, a następnie skopiować do folderu Gauges w głównym folderze FSXa. U mnie to wygląda tak: C:\FSX\Gauges\BB_sextant\… (tutaj są pliki tego sekstantu).
Namawiam do odpakowana BB_sextant.cab ponieważ zaraz zasugeruję edycję jednego z plików xml. Pliki cab można rozpakować zwykłym winrarem.
Instrukcję radzę schować na później – przydaje się. Nie będę tutaj całej powtarzał, więc jeśli masz problem ze zlokalizowaniem miejsca, w które należy kliknąć by coś zmienić – zajrzyj do instrukcji.
Instalacja w panelu
Przerabiam plik panelu B-17 A2A. Zawiera on niepotrzebne mi mapy – w ich miejsce trafi mój panel nawigacyjny. Dla jasności – pracuję z plikiem C:\FSX\SimObjects\Airplanes\WoP2_b17g\panel\Panel.cfg (podkreślona część może u Ciebie wyglądać inaczej – zależnie od lokalizacji folderu FSXa).
Obecnie okno, które przerabiam wygląda tak:
[Window04]
Background_color=0,0,0
size_mm=1024,768
pixel_size=1024,768
window_pos= 0.000, 0.2
position=0
visible=1
ident=50
sizable=0gauge00=WoP3_b17!mapscreen, 255,1,770,766
gauge01=WoP3_b17!map_settings, 1,50,246,232
Window04 oznacza, że jest to panel 2d dostępny pod skrótem klawiszowym Shift+5 (numeracja tych Window zaczyna się od zera / zer).
W pierwszej kolejności dostosowuję wielkość do mojego ekranu:
[Window04]
Background_color=0,0,0
size_mm=1920,800
pixel_size=1920,800
window_pos= 0.000, 0.2
position=0
visible=1
ident=50
sizable=0
Jeśli masz mniejszy ekran niż 1920×1080 – dopasuj pogrubione wartości do swojego ekranu. Ponieważ ten poradnik nie obejmuje zagadnienia konfiguracji panelu – nie będę wyjaśniał znaczenia poszczególnych wpisów. Dla uproszczenia możesz przyjąć, że te, wielkości panelu wpisane na sztywno są całkiem wygodne i pozwolą łatwo pozycjonować i ustalać wielkość elementów panelu.
Na koniec trzeba zmienić wpisy gaugeXX na odpowiednie dla mojego sekstantu.
Było:
gauge00=WoP3_b17!mapscreen, 255,1,770,766
gauge01=WoP3_b17!map_settings, 1,50,246,232
Jest:
gauge00=BB_sextant!sextant, 100,0,386,273
Co oznacza ten wpis:
- gauge00 – numer wskaźnika (00)
- BB_sextant! – nazwa paczki .cab lub folderu z plikami wskaźnika (tego, który wrzuciliśmy do Gauges)
- sextant – nazwa pliku xml z panelem
- 100,0 – pozycja od lewej (100px) i od góry (0px)
- 386,273 – szerokość i wysokość w pikselach
Po wprowadzeniu zmian – uruchamiam samolot.
A co jeśli przerabiam inny samolot?
Po prostu znajduję sobie panel 2d, z którego nie korzystam (jak panel map we wszystkich samolotach A2A) lub wolne miejsce. Okna Window00 – Window08 odpowiadają skrótom klawiszowym Shift+1 do Shift+9. Zasadniczo nie radzę przerabiać Window00 – resztę można traktować dowolnie (choć i tu zalecam, żebyś nie usuwał niczego, czego działania nie rozumiesz – bezpiecznie można wyżywać się na GPSie. Jeśli mam wolne miejsce – wprowadzam nowe okno WindowXX (zachowując kolejność numeracji) i dodaję WindowXX na początku pliku w sekcji [Window Titles].
Więcej o przerabianiu tych plików przeczytasz w poradniku dodawania vasFMC.
Sekstant w FSX – możliwości i ograniczenia?
Najpierw zastrzeżenie – temat sekstantu omawiam w częściach, które pozornie nie mają właściwej kolejności. Tu widzę immanentną sprzeczność – jeśli nie wiesz jak działa to urządzenie – ten wpis będzie początkowo trochę niezrozumiały. Jeśli nie wiesz jak zainstalować i obsłużyć sekstant w FSX – trudno tak do końca zrozumieć jego działanie. Dlatego – jeśli brakuje Ci wiedzy – zainstaluj, pobaw się, przeczytaj ten tekst, instrukcję dołączoną przez Bitzera i Beaumonta, może coś więcej w sieci, a potem wróć tutaj. W idealnej sytuacji jesteś jeśli masz już jakieś, przynajmniej ogólne, pojęcie na temat astronawigacji.
Póki co – ograniczenia techniczne w FSX.
Panel sekstantu pokazuje nam deklinację magnetyczną dla miejsca, w którym znajduje się samolot. To niedobrze, bo niejako założeniem prawdziwej astronawigacji jest to, że deklinacji tak całkiem precyzyjnie nie znamy. Gdybyśmy znali – nasza sytuacja byłaby nieco lepsza, a prowadzona nawigacja – bardziej precyzyjna. Niżej znajdziesz instrukcję jak usunąć to wskazanie.
Po drugie – sekstant w FSX działa w oparciu o wyimaginowane ciała niebieskie. Niezależnie od naszych obliczeń i pozycji realnych gwiazd – w FSX możemy namierzyć każdą gwiazdę, o każdej porze i z jej pomocą sprawdzić pozycję samolotu. To odrealnia loty w dzień, kiedy (najczęściej) dostępne jest tylko słońce, więc w rzeczywistości wyznacza się tylko pojedynczą linię pozycyjną. W FSX możemy wyznaczyć kilka linii pozycyjnych w każdej chwili. Oczywiście – sami możemy sobie nałożyć odpowiednie ograniczenie i używać tylko tych linii pozycyjnych, które dałoby się wyznaczyć realnie.
Trzecie ograniczenie realizmu – sekstant pozwala obserwować ciała niebieskie przy pełnym zachmurzeniu, w ulewie i najgęstszej wyobrażalnej mgle. Rzeczywisty oczywiście wymaga widoczności gwiazd lub słońca. To kolejne ograniczenie, które można na siebie nałożyć.
Czwarte ograniczenie – turbulencje nie przeszkadzają w pracy nawigatora i w obsłudze sekstantu. Żeby przekonać się jakie to trudne w rzeczywistości – spójrzcie przez słabą lornetkę na gwiazdy i spróbujcie utrzymać wybraną gwiazdę w polu widzenia jeśli coś Wami trzęsie (można spróbować jadąc autem). Powiększenie sekstantu używanego w samolotach to 2x, 3x lub więcej. Im większe tym będzie trudniej. Dodatkowo – w sekstancie lotniczym horyzont wyznacza pęcherzyk powietrza w zbiorniku z płynem. Jeśli będzie trzęsło – on też będzie się trząsł i nijak nie wskaże poziomu (to działa w sposób zbliżony do poziomicy). Ciekawostką jest to, że w sekstancie, który polecam tutaj pęcherzyk powietrza jest animowany i podskakując to w górę, to w dół wskazuje na lekkie drgania samolotu i rąk nawigatora. Ale o tym później.
Na co pozwala sekstant w FSX?
Używany realistycznie? Na to, na co prawdziwy. Dzięki sekstantowi możemy wyznaczyć linię pozycyjną z obserwowanego ciała niebieskiego. Jeśli możemy rozpoznać i namierzyć kilka ciał niebieskich, to znając ich pozycje za pomocą sekstantu wyznaczymy kilka linii pozycyjnych, a na ich przecięciu – pozycję samolotu.
Rozprawiam się z tą niepotrzebną deklinacją magnetyczną w panelu sekstantu
Za pomocą notatnika (Aplikacje -> Notatnik) otworzyłem plik C:\FSX\Gauges\BB_sextant\sextant.xml. Następnie wyszukałem fragment:
<Element>
<Position X=”72″ Y=”251″/>
<Text X=”55″ Y=”16″ Length=”6″ Fixed=”Yes” Font=”NEWS GOTHIC MT ITALIC” Adjust=”Center” VerticalAdjust=”Center” Color=”#3C3C3C” Bright=”Yes”>
<String>%((A:GPS MAGVAR,degrees))%!6.1f!</String>
</Text>
</Element>
Cały wpis – od <Element> do </Element> usunąłem. Wyświetlona wartość deklinacji zniknie.
Jak używać?
Kluczem do sprawdzenia pozycji jest (jak w rzeczywistości) określenie przypuszczalnej pozycji oraz świadomość położenia gwiazd względem tej pozycji w momencie, w którym przelatujemy. W rzeczywistości pilot ma dwie możliwości:
- Wziąć namiary na ciała niebieskie, a potem wyliczyć pozycję gwiazd i wyznaczyć linie pozycyjne (określając pozycję w momencie pomiarów czyli kilka-kilkanaście minut wcześniej).
- Wyliczyć pozycję gwiazd według planu lotu (czas i pozycja), a w locie zmierzyć wysokość ciał niebieskich w odpowiednich punktach.
Metoda druga odpowiada warunkom pracy pilota jednoosobowego samolotu, który nie ma czasu i miejsca na wyciągnięcie almanachów i tabel, żeby wykonać obliczenia. Nawigatorzy, którzy dysponują sensownymi warunkami pracy (stolik nawigacyjny, segregatory / książki z tabelami, swoboda poświęcenia całej uwagi obliczeniom) używali obu metod.
Procedura rzeczywista (w odpowiednim do symulatora lotów uproszczeniu – na dole znajdziesz linki do ciekawych materiałów szczegółowo wyjaśniających praktykę i obliczenia realne):
- Określ przypuszczalną pozycję metodą zliczeniową (za pomocą kursu, prędkości, poprawki na wiatr, itp, w odniesieniu do poprzedniej znanej pozycji).
- Zmierz wysokość ciała niebieskiego za pomocą sekstantu.
- Dodaj/odejmij poprawkę na błędy obserwacji.
- Wylicz wysokość i azymut ciała niebieskiego dla pozycji przypuszczalnej.
- Porównaj zmierzoną wysokość ciała niebieskiego z wyliczoną w punkcie 4.
- Różnica w wysokości daje odległość od linii pozycyjnej wyznaczonej przez dane ciało niebieskie.
- Wykreśl na mapie linię pozycyjną prostopadłą do azymutu określonego w punkcie 4, w odległości wyliczonej w punkcie 6.
Punkt pierwszy jest obowiązkowy. Bez przypuszczalnej pozycji nie zrobimy nic (w rzeczywistości będzie bardzo trudno, w symulatorze – wzięcie namiaru się nie uda). To wymaga kilku prostych obliczeń – warto jednak pamiętać, że im nasza pozycja jest mniej pewna (silne wiatry o zmiennym kierunku) tym częściej powinniśmy weryfikować pozycję zliczoną innymi metodami – na przykład za pomocą astronawigacji.
Dwójka w rzeczywistości jest sprawą dość oczywistą – patrzymy na niebo, rozpoznajemy gwiazdę, którą zamierzamy wykorzystać (tego trzeba się nauczyć) i mierzymy jej wysokość nad horyzontem. We Flight Simulatorze to się nie uda. Niżej omówię użycie FSowego sekstantu.
Punkt 3, 4 i 5 to odczyt danych z almanachu i tabel nawigacyjnych oraz kilka obliczeń. Jak miałem wprawę – robiłem to w kilka do kilkunastu minut. Przy pisaniu tego poradnika (tak dla próby i odświeżenia wiedzy po rocznej przerwie) zajęło mi to ponad 20 minut. Wprawa czyni mistrza – realny nawigator robił to oczywiście sprawniej. Ja od dłuższego czasu zadowalam się kalkulacją elektroniczną – Obserwatorium Astronomiczne amerykańskiej marynarki udostępnia kalkulator pozycji gwiazd dla dowolnego miejsca i dowolnej daty/godziny. Postaram się jednak klasyczne obliczenia też kiedyś opisać – ale najpierw muszę sięgnąć do jakiś polskich podręczników i sprawdzić terminologię. Na dole tekstu znajdziesz kilka linków do materiałów anglojęzycznych i jeden do bardzo przystępnego poradnika rosyjskojęzycznego (google translate daje radę).
Ostatnie kroki – rysowanie linii pozycyjnej. Na mapie, w google earth, czy gdzie tam akurat zamierzasz to zrobić. Sekstant pod FSX ma też wersję z nakresem nawigacyjnym, moim zdaniem nie ma on większego sensu – warto sobie tą pozycję narysować na jakiejś realnej mapie.
Krok po kroku w FSX (wyznaczanie pozycji z dwóch gwiazd)
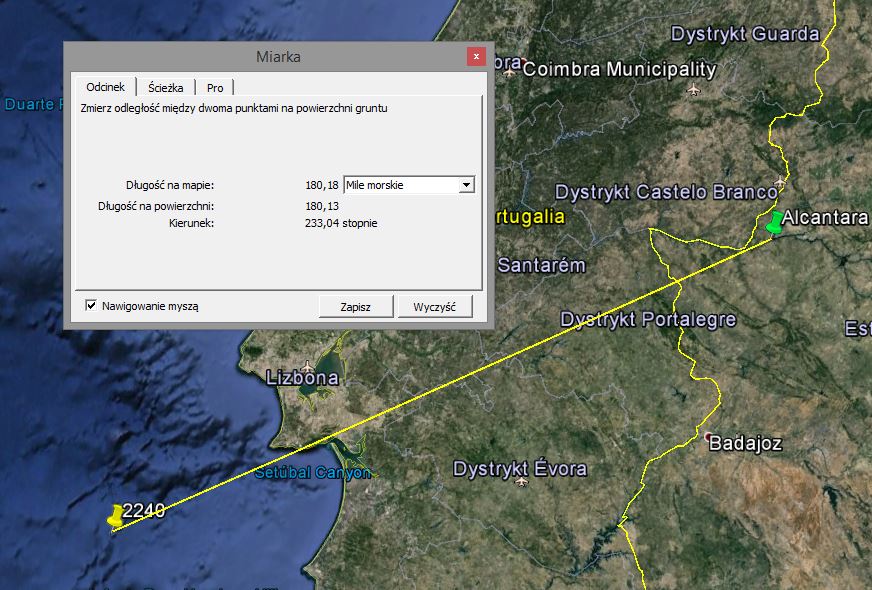
Na przykładzie praktycznym. Lecę z Hiszpanii na Maderę. Moje obliczenia wskazują, że niedawno wleciałem nad ocean, ale nie mogę tego potwierdzić – od dłuższego czasu leciałem nad chmurami. Zaczynam od wyliczenia pozycji przypuszczalnej. Ostatnio pozycję zweryfikowałem nad Alcantarą (charakterystyczne jeziora), stamtąd leciałem z prędkością 220 węzłów (KTAS). Kursem 236 (mag) leciałem przez 50 minut – około 180 mil.
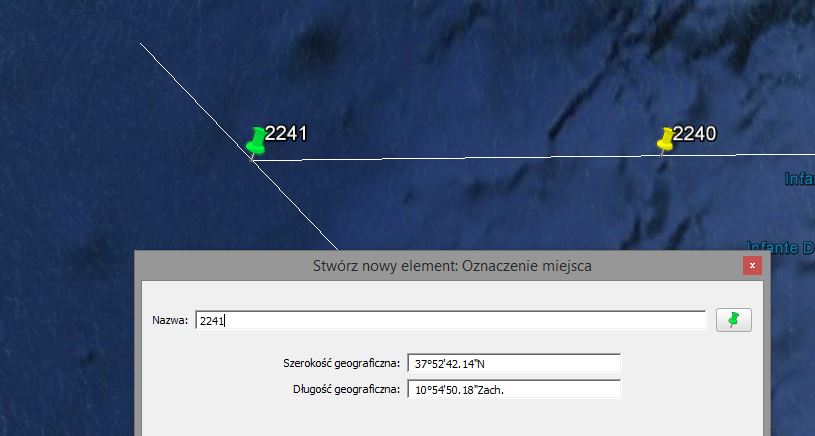
Zaczynam od ostatniej znanej pozycji. Korzystam z Google Earth (można też na papierze, ale tak jest wygodniej, a jeśli wrzucę Wam tu zdjęcia papierowej mapy to nic nie będzie czytelne). Nad Alcantarą wbiłem pineskę (zieloną – wybór kolorów jest dowolny, u mnie zielona = pozycja znana) i zanotowałem czas (ZULU). Teraz rysuję linię o długości 180 mil kursem 233 (236 mag minus 3 stopnie zachodniej deklinacji magnetycznej odczytanej dla tego regionu – pamiętaj, że w FSX deklinację trzeba zaktualizować jeśli korzystasz z aktualnych map). Na końcu tej linii wbijam pineskę (żółtą – przypuszczalna pozycja) i wpisuję godzinę. Przestrzegam przed nadmiernym aptekarstwem przy użyciu Google Earth – kreślenie linii z dokładnością do setnych części stopnia nie ma nic wspólnego z rzeczywistością nawigatora lotniczego, który miał ekierkę-kątomierz i lepiej lub gorzej zaostrzony ołówek.
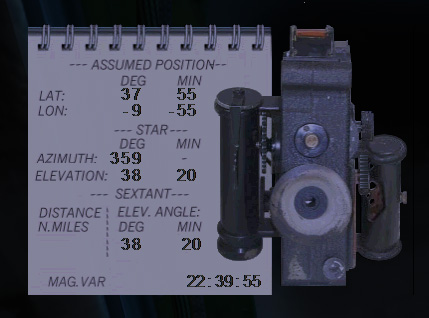
Teraz pora otworzyć panel sekstantu i wprowadzić przypuszczalną pozycję (assumed position), którą odczytałem z żółtej pineski. LAT: 37°55′, LON -9°55′. Działamy z dokładnością do 5 minut. Większa precyzja jest nieosiągalna. Szerokość geograficzną (LAT) ustawiamy co 2 stopnie zgrubnie, a nieparzyste stopnie można wyklikać dodając lub odejmując minuty. Ja ustawiłem 38°00′ a potem odjąłem 5′. Klikam obok wartości – instrukcja pokazuje dokładnie gdzie.

Pora rozejrzeć się za jakąś gwiazdą. Sekstant w FSX nie współpracuje z FSowymi gwiazdami (których pozycja jest na bakier z rzeczywistością, choć można to naprawić). Dlatego tutaj potrzebujemy realnej pozycji gwiazd. Jak wspominałem – można sięgnąć do almanachu i tabel, a potem wyliczyć pozycję. Na tym poziomie poradnika sugeruję jednak kalkulator Obserwatorium Astronomicznego U.S. Navy.
U mnie strona USNO nie działa, więc korzystam z serwera proxy – to się wiąże z wyświetlaniem reklamy, którą można zamknąć.
Do kalkulatora wprowadzam datę (20.01.2015), godzinę (22:40:00 Zulu) i pozycję (North: 37°55′ / West: 9°55′). Otrzymany wynik to tabela, w której najbardziej interesują mnie gwiazdy niebieskie (podstawowe gwiazdy używane w nawigacji) lub zielona gwiazda polarna. Oczywiście – to powinny być gwiazdy, które potrafisz zidentyfikować na niebie. Dla uzyskania dobrych linii pozycyjnych warto wybrać dwie gwiazdy, o azymutach różnych o około 90 stopni. Ja skorzystam z Polarnej (chyba nikt nie ma problemu z rozpoznaniem). Po namyśle (i wzięciu pod uwagę moich realnych umiejętności) do drugiego namiaru użyję gwiazdy Aldebaran – łatwo rozpoznać w sąsiedztwie Oriona.

W oknie sekstantu wypełniam Azimuth i Elevation dla pierwszego pomiaru – Gwiazdy Polarnej. Azymut – Zn – 359. Wysokość ustawiam za pomocą pokręteł, które zaznaczyłem – Hc – 38°21′ (po odjęciu 1,3′ poprawki). W przybliżeniu 38°20′.

Teraz mogę rozpocząć pomiar pozycji. Pojawia się wizjer, a w nim (jeśli pozycja zliczona leży w pobliżu linii pozycyjnej) gwiazdy i bańka powietrza. Będą się delikatnie poruszały, a zadaniem operatora jest tak przestawić wysokość, żeby bańka powietrza z grubsza pokrywała się z największą gwiazdą. W przypadku mojego pierwszego pomiaru pokrywa się idealnie.
W tym sekstancie, którego używam nie działa przeliczanie odczytu wysokości na dystans, ale nie szukałem innego – 1 minuta różnicy = 1 mila morska. Nie potrzebuję do tego automatu. Zapisuje sobie w notatkach, że linia pozycyjna dla azymutu 359 przebiega przez punkt pomiaru.
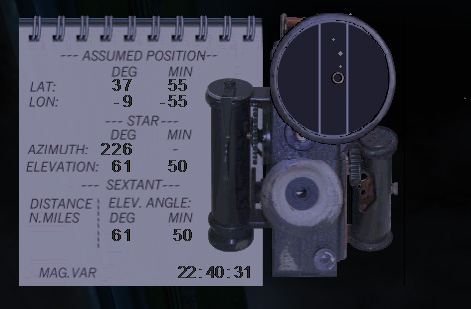
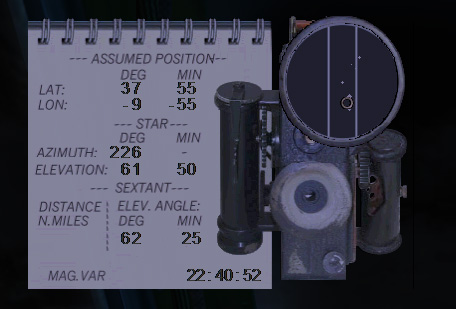
Czas na drugą gwiazdę. Aldebaran. Azymut 226°, wysokość 61°49,4′. 61°50′ na potrzeby sekstantu. Ponawiam pomiar z tymi ustawieniami. Tym razem musiałem zwiększyć wysokość o 35 minut kątowych. Czyli 35 mil. Ta wartość trafia do notatek. Pora zajrzeć na mapę.
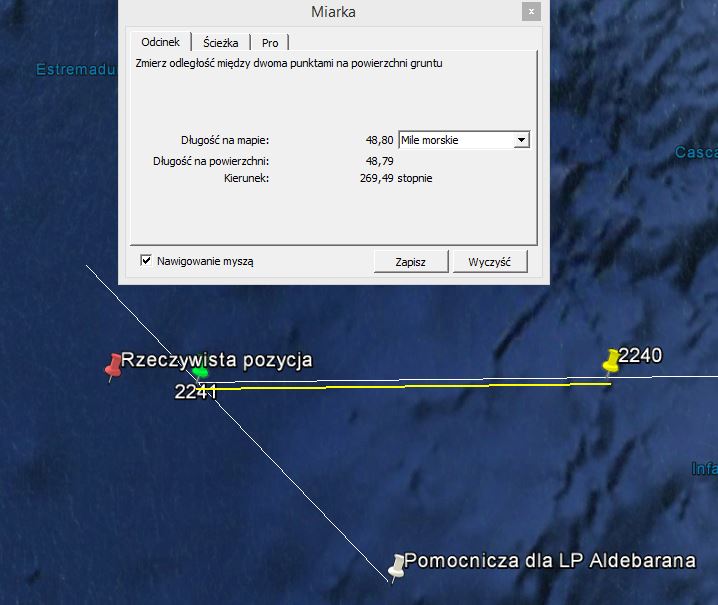
Pierwsza linia pozycyjna przechodzi przez punkt, w którym byłem. Więc rysuję taką linię przecinającą ten punkt kursem 269 (prostopadły do azymutu gwiazdy).
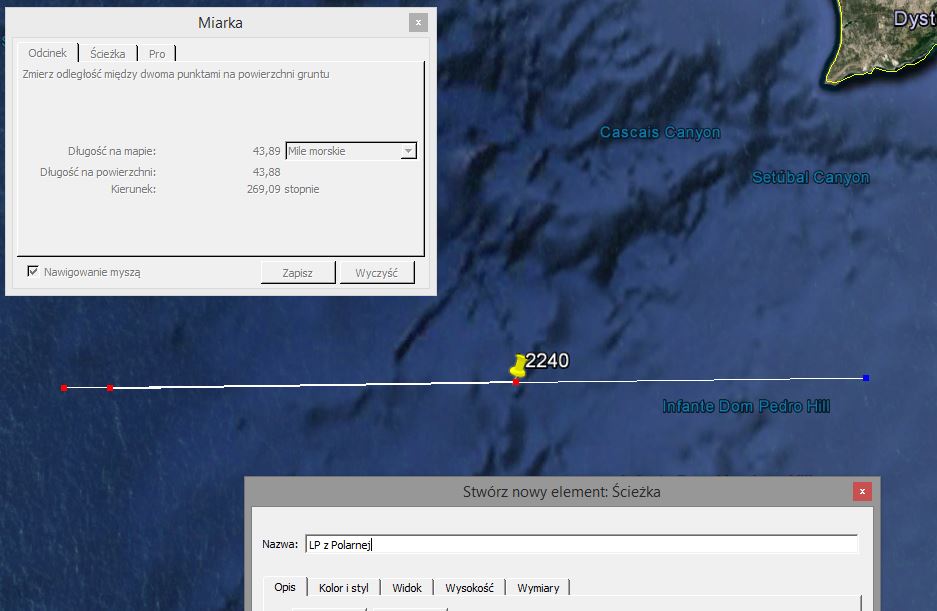
Uwaga techniczna – żeby zrobić to w GE sprawnie – użyj miarki do wyznaczenia kierunku, a następnie wykreśl linię (narzędzie ścieżka) dodając punkt na końcu miarki i drugi – na początku lub nawet dalej. Jeśli nowa linia nie jest równoległa do miarki – skasuj drugi punkt (kliknij prawym przyciskiem myszy na nim) a potem dodaj ten punkt jeszcze raz. U mnie trafienie tej linii, którą widać na obrazku wymagało trzech prób – ale to kilka sekund i ołówkiem z kompletem przyborów geometrycznych nie zrobiłbym tego szybciej.
Druga linia pozycyjna ma być przesunięta o 35 mil. W pierwszej kolejności znajduję punkt 35 mil od mojej przypuszczalnej pozycji w kierunku 226. W kierunku ponieważ wysokość wzrosła w porównaniu z oczekiwaną – czyli jestem „bliżej”. Upuszczę sobie tam jakąś pineskę pomocniczą, żeby mi to miejsce nie zginęło (biała pineska).
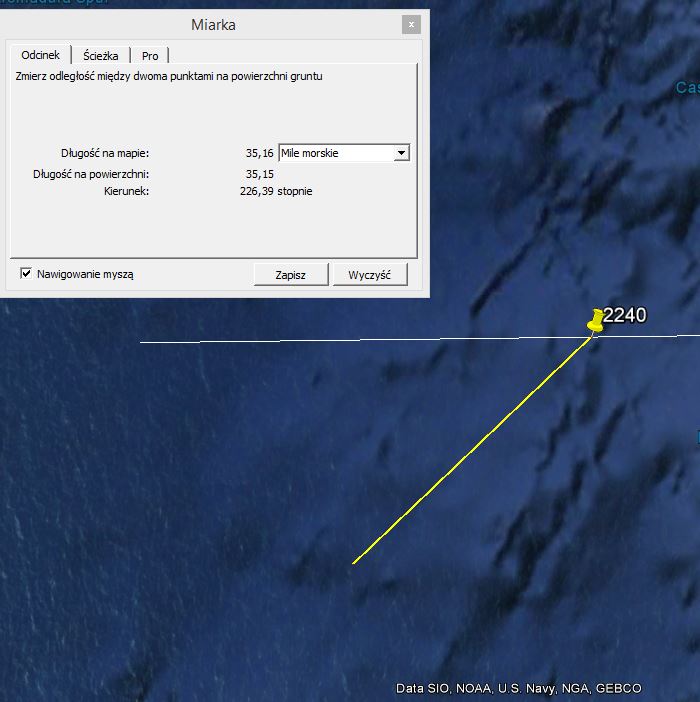
Teraz od znalezionego miejsca kreślę linię pozycyjną pod kątem prostym. Metoda taka sama jak wcześniej.
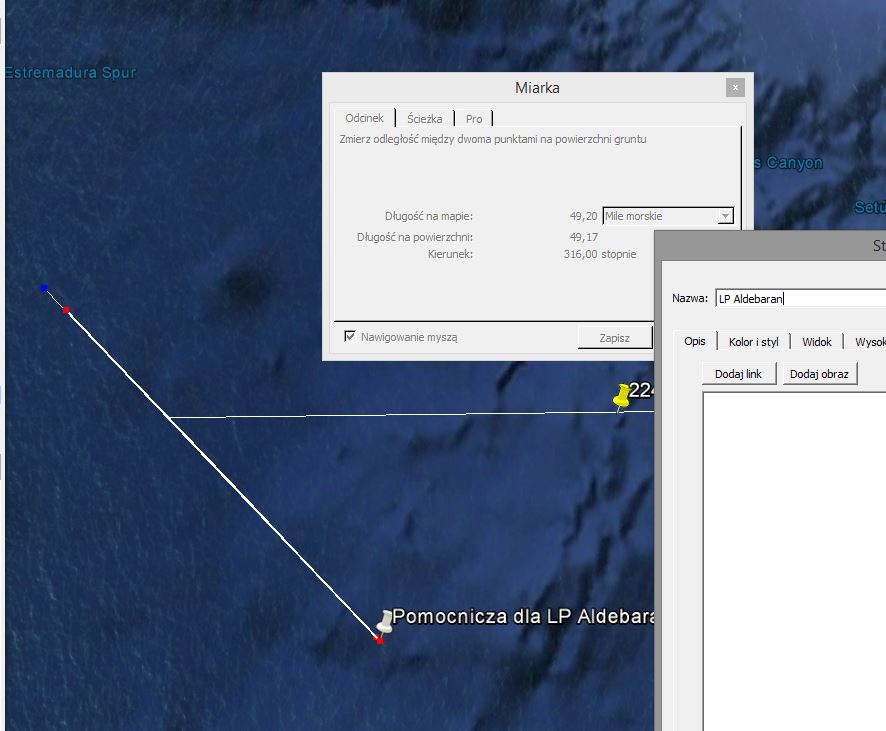
Miejsce przecięcia moich dwóch linii pozycyjnych (LP) to pozycja statku powietrznego w momencie pomiaru.
Jak poszło? Weryfikuję pozycję z odczytem z mapy FSXa. Moja pozycja w pół minuty po zakończeniu pomiarów znajduje się 10 mil na zachód od wyznaczonej przeze mnie. Pozycja, którą wyliczyłem bez posiłkowania się astronawigacją różni się od osiągniętej faktycznie o 60 mil.
Z czego wynika błąd 10 mil? 3-5 mil to błąd niemal nieunikniony, a trafienie w punkt jest kwestią przypadku. Przypomnę tylko, że ten sekstant posługuje się pięciomilową podziałką odległości (ściślej precyzja pomiaru wysokości jest pięciominutowa). 5 do 10 mil to bardzo częste błędy wynikające z przyjęcia linii pozycyjnych tworzących kąt ostry. Tak jest w tym wypadku – błąd pomiaru wysokości Aldebarana to właśnie 5 mil – pod kątem – rośnie. Czasem te odczyty nie są na tyle wyraźne, żeby takiego błędu uniknąć, więc nie przejmujcie się jeśli nie traficie w punkt (tak ma być – „that’s not a bug it’s a feature”).
Jak unikać takich błędów? Pomaga trzeci pomiar!
Użyję gwiazdy Hamal, czyli Alfa Arietis w gwiazdozbiorze Barana. Azymut 271 (to najlepszy azymut do wykreślania pozycji w parze z Gwiazdą Polarną) i wysokość 38°55′ (z uwzględnieniem poprawki i zaokrągleniem do podziałki tego sekstantu).
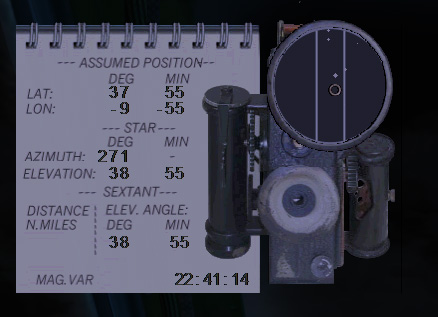
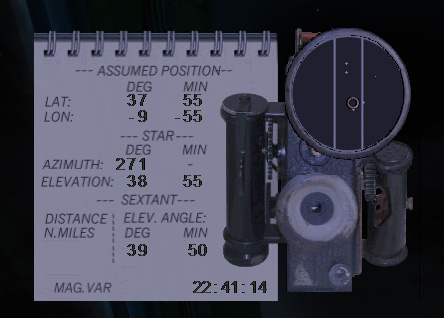
Wyraźnie niżej. Zwiększam wysokość kręcąc pokrętłem i obserwując pozycję gwiazdy w wizjerze. Różnica wysokości? 55 minut. Czyli 55 mil. Tak naprawdę to 57 mil, bo przed zaokrągleniem wysokość gwiazdy to 38°53′.
W tym wypadku nie muszę nawet kreślić linii pozycyjnej – jeśli wiem, że dwie linie pozycyjne przecinają się pod kątem prostym (2 stopnie nie robią żadnej różnicy) to mogę odłożyć tę odległość na pierwszej linii pozycyjnej (tej od Gwiazdy Polarnej). Widać, że niemal nie ma już błędu. Nie zamierzam tu być aptekarsko precyzyjny – te kilka mil nad oceanem wystarcza w zupełności. To lepiej niż precyzja radionawigacji w odległości 150 mil od pomocy nawigacyjnej.
Sens i znaczenie?
W locie nad oceanem błąd pozycji zliczonej wynosił 60 mil na dystansie 180 (zakładanym) / 240 (realnym). Celowo nie wziąłem pod uwagę wiatru, żeby jakiś błąd się pojawił. To dużo, ale latając wolnym samolotem na wysokości, na której wiatr osiąga sporą siłę, to coś, co może się zdarzyć zawsze – wystarczy źle odczytać czy przepisać dane meteo… Czasem zresztą do danych o wietrze na dużej wysokości nie ma dostępu (to w epoce różnych B-17 czy Boeingów 377 sytuacja normalna, wręcz częsta). W tym, przejaskrawionym, przypadku Maderę minąłbym o 100 mil. Nieciekawa perspektywa. Wykorzystanie sekstantu pozwoliło poprawić pozycję, obliczyć właściwą poprawkę na wiatr i kontynuować lot dużo bardziej precyzyjnie.
A w dzień?
Pokazałem wyżej przykład idealny – lot nocny, z pełną widocznością nieba. Trudniejszą opcją jest lot dzienny, w którym ze słońca można wyznaczyć tylko pojedynczą linię pozycyjną. W tej sytuacji cały lot trzeba zaplanować odpowiednio do metody prowadzenia nawigacji i wybrać porę, w której wyznaczona linia pozycyjna pozwoli znaleźć cel. W warunkach optymalnych stosuje się jedną z dwóch linii – linię drogi lub linię prędkości. Pierwsza z nich to linia pozycyjna pokrywająca się z linią drogi. Dzięki niej „trafimy” w punkt docelowy, ale po drodze nie mamy możliwości stwierdzenia postępu. Linia prędkości to linia prostopadła do linii drogi. Dzięki niej sprawdzimy postęp, ale nie potwierdzimy utrzymania właściwej trasy. To potraktujcie jako zachętę do dalszych poszukiwań. Szerszy opis takiego planowania pojawi się wkrótce – ten tekst już przekroczył budżet ilości słów…
Gdzie szukać informacji?
Jest sporo stron, które starają się popularyzować zanikającą sztukę astronawigacji. Polecam bardzo przystępny poradnik w języku rosyjskim (użyj google translate).
Ciekawa jest również strona Henninga Umlanda, warto zajrzeć też na celestialnavigation.com.
Jeśli szukacie almanachów i tabel – kilka znajdziecie tutaj:
Ja zacząłem od nauki z podręczników amerykańskiego lotnictwa z czasów wojny. Można je pobrać tutaj.