Do czego przyda się radiolatarnia NDB na trasie? Tym razem o tym jak latać według namiaru na NDB, jak wyznaczyć pozycję za pomocą dwóch lub jednej radiolatarni. Również o tym kiedy (i jak) posiłkować się radiowymi pomocami nawigacyjnymi w locie z widocznością terenu.
Jeśli nie czytałeś poprzednich wpisów nawigacyjnych – zajrzyj do tych:
- Radionawigacja cz. 1 – radiowe pomoce nawigacyjne
- Wyznawcy różowej linii (o precyzji w nawigacji)
- Kurs, radial, kąt drogi, wektor, trójkąt prędkości… kierunki w nawigacji
Warto też przejrzeć inne tekstu w dziale Poradniki / Nawigacja.
Założenia
Licealna nauczycielka matematyki zawsze podkreślała znaczenie założeń – zostało mi to do dziś 😉 Na wstępie – zakładam, że pewne pojęcia już znasz i posiadasz podstawowe umiejętności. Te pojęcia to między innymi kierunek drogi, kurs, namiar, różnica między namiarem geograficznym i magnetycznym, ortodroma, loksodroma… opisałem je niedawno. Zakładam też, że wiesz, która strzałka w kokpicie to ADF i umiesz nastawić częstotliwość wybranej radiolatarni w samolocie, którym latasz w FSX (lub innym symulatorze). Jeśli nie wiesz – zajrzyj do instrukcji, tutaj będzie o nawigacji, a nie o klikaniu. Zakładam też, że na lekcjach geometrii uważałeś i coś tam jeszcze pamiętasz.
1. Lot w kierunku radiolatarni (i odlot od NDB)
Wydawałoby się, że nie ma nic prostszego. Wybieramy częstotliwość, czekamy aż strzałka ADF wskaże kierunek, zakręcamy samolotem w wyznaczoną stronę – czyli zakręcając ustawiamy strzałkę pionowo w górę i dalej prowadzimy samolot utrzymując tą strzałkę w takiej pozycji, aż miniemy radiolatarnię. W sumie dobrze – NDB osiągniemy… ale niekoniecznie polecimy najkrótszą trasą. Jeśli natrafimy na wiatr boczny, to polecimy po łuku, zmieniając kurs w miarę znoszenia.
Znoszeniu można zaradzić wprowadzając odpowiednią poprawkę na wiatr. Są dwa sposoby, które na dobrą sprawę należy stosować razem dla najlepszych efektów.
a) Lot z poprawką na wiatr. Po ustawieniu się na kursie na NDB sprawdzamy w notatkach jaki wiatr prognozowano dla okolicy, w której znajduje się samolot. Po sprawdzeniu wiatru – wykorzystujemy prognozowaną siłę i kierunek wiatru, oraz aktualny kierunek drogi (wyznaczony namiarem na radiolatarnię) i prędkość lotu do obliczenia poprawki na wiatr z nawigacyjnego trójkąt prędkości. Po wprowadzeniu poprawki lecimy kursem nieco innym (różnym o poprawkę) od namiaru na radiolatarnię. Strzałka będzie cały czas odchylona w bok (w idealnych warunkach – o wartość poprawki, ale warunki nie są nigdy idealne, więc należy zapoznać się z metodą ustalania odpowiedniej poprawki).
b) Wspomniana wyżej metoda jest świetna jeśli znamy precyzyjnie kierunek i siłę wiatru. Na ogół wystąpią wieksze lub mniejsze różnice między prognozą a rzeczywistymi warunkami. Pomimo lotu z ustaloną poprawką na wiatr – strzałka ADF będzie zmieniała położenie – namiar na pomoc nawigacyjną się zmieni. Aby lot w kierunku radiolatarni odbył się po prostej – namiar powinien być stały. Należy więc zwiększyć lub zmniejszyć poprawkę na wiatr – tak, żeby strzałka ADF pokazała powtórnie właściwy namiar.
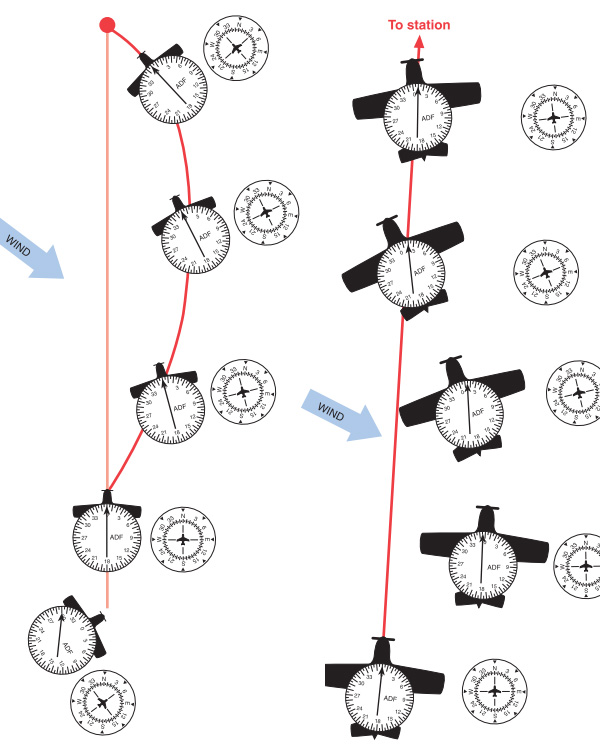
(ilustracja: FAA / PD)
Ilustracja pokazuje obie sytuacje. Po lewej samolot zakręca w kierunku NDB, a następnie utrzymuje radiolatarnię na wprost nosa samolotu (namiar zero w stosunku do osi samolotu). Po prawej stronie pilot leciał w stronę radiolatarni kursem zero, ale (pozycja druga od dołu) zauważył, że strzałka ADF odchyliła się w lewo o 10 stopni. Skorygował kurs zakręcając w lewo i leci kursem 340 (3 pozycja od dołu) aż do momentu kiedy ADF wskaże 20 stopni w prawo (pozycja 4 od dołu – 20 stopni w prawo, w locie kursem 340 to namiar „zero” na radiolatarnie). W tym momencie skręca w prawo, na kurs 350 i leci tym kursem utrzymując strzałkę ADF w pozycji 10 stopni w prawo względem osi samolotu.
Na tej ilustracji nieco przesadzono – pilot prawdopodobnie podjąłby działanie znacznie wcześniej – kiedy odchylenie wynosiłoby 2-5 stopni (ale w tej skali łatwiej zilustrować problem). Również wybranie właściwego kursu nie odbywa się w takim przypadku jednym zakrętem – konieczne jest śledzenie namiaru radiolatarni i kilka coraz mniejszych korekt, tak aby ostatecznie znaleźć właściwy kurs. Oczywiście to sytuacja, w której wiatr jest stały. Przy zmieniającej się sile i kierunku wiatru potrzebne będą kolejne poprawki – te pilot wprowadza za każdym razem obserwując namiar na ADF.
W przypadkach na ilustracji pilot posługuje się najbardziej prymitywnym urządzeniem ADF – pokazującym namiar względem osi samolotu (tarcza ADF jest stała). Namiar magnetyczny na pomoc nawigacyjną oblicza z kursu samolotu i namiaru z ADF. Wygodniej byłoby użyć instrumentu z tarczą obrotową lub RMI. W pierwszym przypadku chcąc lecieć po drodze wyznaczonej namiarem zero na pomoc nawigacyjną – pilot musi ustawić tarczę zgodnie z kursem samolotu (po każdej zmianie kursu poprawić) i korygować drogę tak by strzałka wskazywała zero. Na RMI tarcza będzie się obracała automatycznie, a zadaniem pilota jest jedynie utrzymywanie jej tak by wskazywała zero.
Poprawkę zawsze wprowadzamy w kierunku błędu. Jeśli strzałka na RMI odchyli się w prawo od zadanego namiaru – należy skręcić w prawo. Jeśli strzałka odchyli się w lewo od zadanego namiaru – należy wprowadzić poprawkę w lewo.
Analogicznie wykonywany jest odlot od radiolatarni.
Ćwiczenia. Warto sobie różne scenariusze lotów w kierunku i od radiolatarni przemyśleć „na sucho” patrząc na mapę (np. na skyvector.com) i analizując jak wyglądałyby wskazania przyrządów w różnych sytuacjach. Przy odrobinie wprawy wszystkie działania, które opisałem wyżej będą intuicyjne.
Ciekawym rozwiązaniem do ćwiczeń jest symulator wskaźnika ADF dostępny tutaj – http://www.pyrochta.ch/flash/start_adf.htm. Michał, który również bloguje o FSX i lotnictwie podzielił się linkiem – dziękuję!
2. Pozycja z namiarów na dwie NDB
Przy dwóch NDB pilot może wyznaczyć pozycję na mapie korzystając z namiarów na radiolatarnie. Pozycja będzie wyznaczona najdokładniej jeśli kąt między tymi namiarami będzie zbliżony do 90 stopni.
Jak się do tego zabrać? Ustawiamy częstotliwość pierwszej radiolatarni i sprawdzamy jej namiar – należy go zapamiętać lub zanotować. Następnie ustawiamy częstotliwość drugiej i zapisujemy (zapamiętujemy) jej namiar. Na mapie kreślimy od obu radiolatarni linie pozycyjne w kierunku przeciwnym do namiaru rzeczywistego (namiar minus 180 stopni – w zakresie wartości 0-359). Tu trzeba pamiętać o przeliczeniu namiaru magnetycznego, na namiar rzeczywisty.
Powyższy opis jest uproszczeniem porządnej instrukcji i nadaje się do precyzyjnego wyznaczania pozycji w odległości do kilkudziesięciu mil od radiolatarni. W większych odległościach należałoby wziąć pod uwagę to, że namiar to ortodroma, więc namiar przeciwny może mieć kąt inny niż namiar-180 stopni, ale na potrzeby nawigacji cywilnej i stosowania takiego namierzania w dzisiejszym lotnictwie (niemal nikt nie namierza już pozycji z radiolatarni odległych o 300 mil) można przyjąć, że namiar to loksodroma. I znów – jeśli nie całkiem rozumiesz o czym piszę – zajrzyj tutaj.
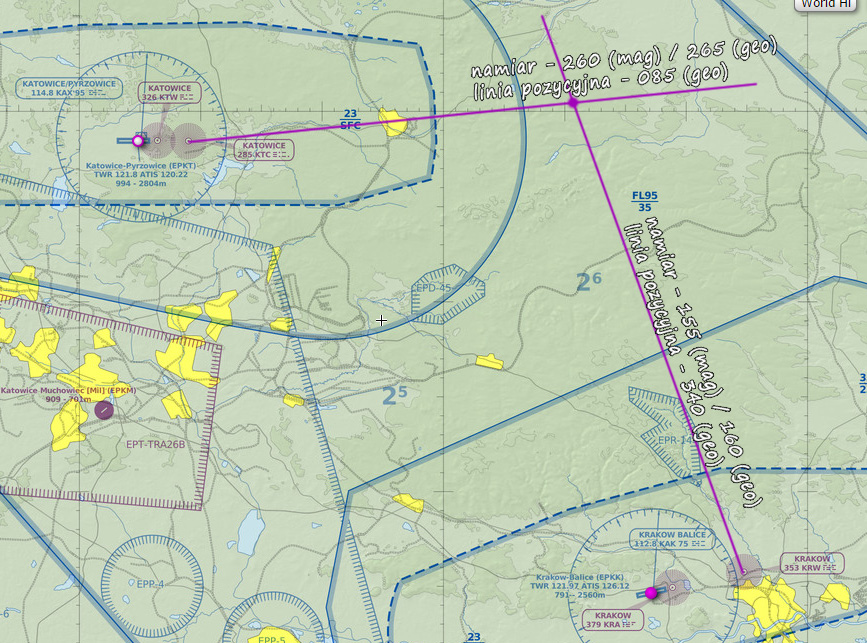
(tło: mapa Skyvector.com)
W zilustrowanym przykładzie pilot namierza NDB Katowice (285 kHz) i NDB Krakow (353 kHz). Planując lot sprawdził w AIP (ENR 4.1), że obie mają zasięg 40 mil. RMI dla KTC pokazało namiar 260, dla dla KRW 155. Po przeliczeniu namiary rzeczywiste to odpowiednio 265 i 160 (deklinacja 5 stopni E). Z obu radiolatarni na mapie pilot kreśli linie pozycyjne w kierunku 085 od KTC i 340 od KRW. Na przecięciu tych linii pozycyjnych znajduje się samolot.
Tak wyznaczona pozycja może być obarczona kilkoma błędami i w miarę oddalania się od radiolatarni dokładność tej metody maleje, ale zwykle tak wyznaczona pozycja nie musi być idealnie precyzyjna.
Praktyczne stosowanie takiej metody inaczej wygląda w samolocie z załogą dwuosobową i jednoosobową – kiedy pilot musi jednocześnie prowadzić samolot i może mieć trudność w kreśleniu wg ekierki-kątomierza po mapie (szczególnie w ciasnym kokpicie). Zupełnie inaczej wygląda to w samolocie, w którym nawigator ma swoje stanowisko i dobre warunki pracy.
Rozwiązanie dla wirtualnych pilotów. Zdaję sobie sprawę z tego, że mało kto w lotach wirtualnych używa papierowych map, a trudno otwierać program graficzny i coś w nim kreślić. Szukając w ten sposób swojej pozycji korzystam z serwisu skyvector.com tworząc „plan lotu” składający się z trzech punktów – (1) pierwszej pomocy nawigacyjnej, (2) mojej przewidywanej pozycji i (3) drugiej pomocy nawigacyjnej. Odcinek 1-2 traktuję jak linię pozycyjną i tak przesuwam punkt 2 by miała ona właściwy kąt. Następnie dalej przesuwam punkt 2 po wyznaczonej między 1 i 2 linii pozycyjnej, tak aby odcinek 2-3 miał kąt identyczny z namiarem na drugą pomoc nawigacyjną.
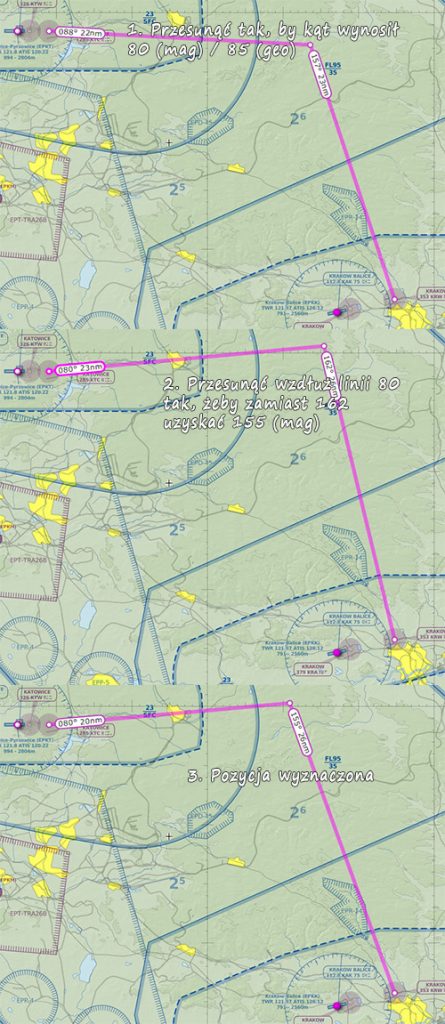
Oczywiście identyczną operację można wykonać w serwisie lecimy.org. Trzeba tylko pamiętać, że kąty linii drogi w skyvector to kąty magnetyczne, a w serwisie lecimy.org tabela po prawej stronie pokazuje kąty rzeczywiste.
Kiedy to się przydaje? Ja najczęściej posiłkuję się taką metodą wyznaczania położenia w wirtualnych lotach nad Alaską, Papuą Nową Gwineą i Afryką, a także nad Pacyfikiem. Są miejsca gdzie nie ma VOR lub VOR nie ma zasięgu na małej wysokości i określenie pozycji wg NDB jest jedyną metodą znalezienia niewielkiego lotniska czy wysepki. Naturalnie tą metodą można również wyznaczać pozycję z namiaru na NDB i radiala VOR (jeśli trafimy na nadajnik VOR bez DME, o wyznaczaniu pozycji z VOR w następnym tekście tego cyklu).
3. Pozycja z jednej NDB
Jeśli jesteśmy w stanie namierzyć tylko jedną NDB to określenie pozycji jest znacznie trudniejsze i obarczone dużo większym błędem. W dodatku wymaga czasu – tym więcej im dalej od NDB próbujemy ustalić pozycję. Typowy scenariusz to lot właśnie nad… dajmy na to – australijskim interiorem. Niech to będzie taka trasa: STREAKY BAY -> WUDINNA. Warunki są bliskie minimów dla lotów VFR, punktów orientacyjnych w okolicy jest niewiele a jakoś na to lotnisko trzeba trafić. Można oczywiście pójść na łatwiznę i polecieć dłuższą trasą przez MINNIPA. W takim locie pilot zrealizuje scenariusz opisany w pierwszym punkcie – czyli dolot do NDB według namiaru i odlot według namiaru. Można jednak wykonać ten lot po prostej – potwierdzając pozycję w oparciu o NDB MPA. Jak to wygląda. Rzuć okiem na ten plan lotu.
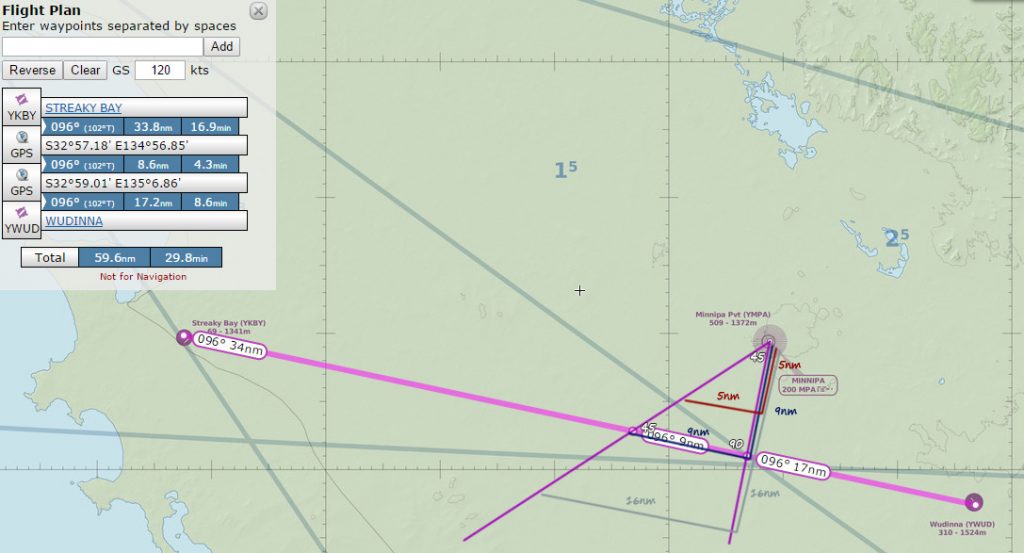
Co warto zauważyć – w tym planie pilot posłuży się podstawowymi zasadami geometrii, używając trójkąta prostokątnego, równoramiennego do wyznaczenia pozycji. Ramiona trójkąta tworzą namiary na NDB – pierwszy różny o 45 stopni od linii drogi, a drugi różny o 90 stopni od linii drogi (prostopadły do linii drogi). Trzecim bokiem trójkąta będzie linia drogi.
Znając prędkość lotu, pilot może zmierzyć czas od momentu kiedy pomoc nawigacyjna znajdzie się w namiarze 45 stopni z lewej (w tym wypadku w namiarze magnetycznym 051) do momentu kiedy pomoc nawigacyjna znajdzie się na lewym trawersie (namiar magnetyczny na NDB – 006). Jeśli wynik pomiaru to 4 minuty i 18 sekund – samolot pokonał 9 mil. Z konstrukcji trójkąta równobocznego pilot wie, że znajduje się 9 mil od NDB. Na ilustracji to przypadek granatowy. Pozycja – idealnie na trasie.
Jeśli upłynęło mniej lub więcej czasu (przypadki czerwony i szary) – pilot wie, że jest odpowiednio 5 lub 16 mil od NDB. Zaznacza na mapie nową pozycję i wyznacza z niej kurs na lotnisko docelowe. Jednocześnie powinien policzyć od nowa poprawkę na wiatr – uwzględniając wiedzę o faktycznym kącie znoszenia. Nową poprawkę powinien zastosować w dolocie do lotniska docelowego.
Metoda oczywiście nie jest idealna. Samolot znoszony wiatrem z nakazanej linii drogi nie będzie się poruszał idealnie wzdłuż boku trójkąta równoramiennego i przez to pomiar będzie niedokładny. Pilot może też przyjąć nieprawidłową prędkość nad ziemią. Mimo tych mankamentów – taki sposób wyznaczania pozycji daje ogólne pojęcie o pozycji na trasie i w przypadkach kiedy się go używa wystarcza do prowadzenia nawigacji.
Podany tutaj przykład trójkąta równoramiennego i kąta 45 stopni to nie jest jedyna możliwość. W ten sposób można wyznaczyć pozycję z dowolnych namiarów na jedną NDB – choć dla kątów 45/90 jest to najłatwiejsze, a przy 17/74 nie obędzie się bez tablic trygonometrycznych. Najlepiej trzymać się tych kątów, dla których odpowiednie wartości można policzyć w pamięci – a to ogranicza nas do trójkąta równoramiennego z kątami 45 stopni, trójkąta równobocznego i trójkąta o kątach 30/60/90 (czyli połowa równobocznego).
Kiedy ta technika się przydaje? To zależy jak traktujemy wirtualne lotnictwo. W warunkach „as real as it gets” – warto to znać, ale przyjmujemy, że samolot obecnie niemal na pewno ma GPSa, więc jeśli pilot się zgubi to po prostu sprawdzi pozycję. Jeśli symulujemy „as real” loty historyczne – np. loty samolotów wyposażonych nieco skromniej – ta technika okaże się bardzo przydatna kiedy pilot się zgubi. Oczywiście – zawsze można polecieć do jakiejś NDB i po jej osiągnięciu określić swoją pozycję. W większości przypadków nie będzie to konieczne jeśli pamiętamy o tym, że z dwóch namiarów i czasu przelotu między nimi można wyznaczyć miejsce, w którym samolot się znajduje.
Znów podkreślę – to metoda średnio precyzyjna. Ale też nie chodzi tu o sprowadzenie jumbo jeta na lotnisko w gęstej mgle, tylko o szybkie wyznaczenie przybliżonej pozycji.
Ta technika może się przydać nawet w locie VFR. Jeśli stracimy orientację – o co w warunkach Flight Simulatora bardzo łatwo, bo scenerie niedomagają – możemy poświęcić mnóstwo czasu i uwagi wpatrując się w mapę i próbując znaleźć miejsce, które pasuje do tego, co widać za oknem. Możemy też skorzystać z pomocy nawigacyjnej i zawęzić obszar poszukiwań – uwagę poświęcając temu to jest ważniejsze – czyli prowadzeniu samolotu.
4. Radionawigacja w locie według punktów charakterystycznych terenu
Czytając fora poświęcone symulatorom odnoszę wrażenie, że powszechnie się wiąże radionawigację z lotami IFR, a nawigację według punktów charakterystycznych terenu z lotami VFR. Nic bardziej błędnego – sposób prowadzenia nawigacji nie jest powiązany bezpośrednio z zasadami wykonywania lotu. Można (a nawet powinno się) korzystać ze wszystkich metod wyznaczania pozycji, które są dostępne.
Mała dygresja historyczna. Jak bardzo ważne jest stosowanie kilku metod prowadzenia nawigacji pokazuje przykład DC-4, który niedługo po wojnie rozbił się u brzegów Irlandii – załoga miała radionamierniki i przeleciała nad wieloma radiolatarniami i radiostacjami. Mieli też na pokładzie odbiornik systemu nawigacyjnego LORAN, mieli też sekstans (nawet okazjonalnie brali namiary na gwiazdy). Obserwowali też kilkakrotnie teren, nad którym przelatywali jeśli akurat warunki na to pozwalały. A jednak minęli Irlandię znacznie i zanim wrócili – zabrakło paliwa. Przy czterech członkach załogi formalnie prowadzących nawigację (dwaj piloci + radiooperator odpowiedzialny za namiary radiowe + nawigator) zgubili się w locie z pasażerami. To tragiczny (były niestety ofiary) przykład tego, że warto łączyć różne metody. W przypadku tego DC-4 zawiedli ludzie, którzy się zwyczajnie pomylili obserwując teren. Pomylił się też nawigator niewłaściwie odczytując pozycję gwiazd. Z wiarygodnych namiarów na radiostacje i z systemu LORAN nie skorzystali… bo wydawało się, że wiedzą gdzie są.
Jak sobie pomóc w locie VFR? Czy szerzej – jak sobie pomóc przy każdym sposobie prowadzenia nawigacji, w każdym locie (w którym chcemy być bardziej niż pewni pozycji). Przede wszystkim można uzupełnić wyznaczoną trasę kilkoma namiarami na pomoce nawigacyjne, które potwierdzą poprawną identyfikację punktów terenu. Weźmy taką przykładową trasę.
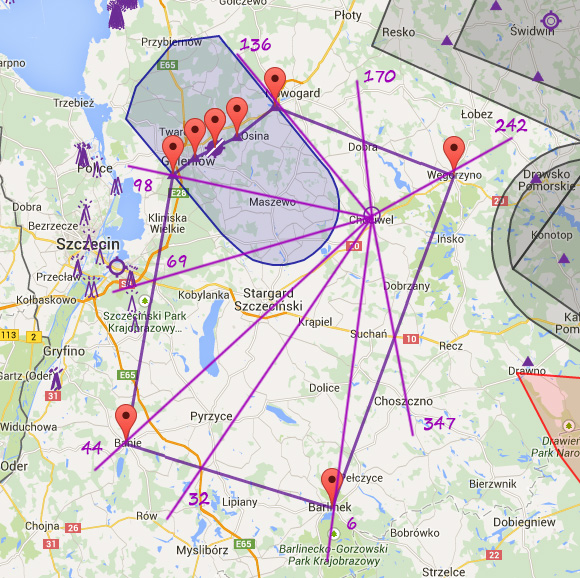
Do przygotowanego planu lotu dodałem namiary na radiolatarnię CHO, według których rozpoznane punkty będą weryfikowane. Dzięki temu trudniej będzie pomylić jedną miejscowość z drugą, drogę krajową z drogą lokalną (doświadczenie pokazuje, że czasami ta lokalna może wyglądać bardziej okazale niż krajówka)…
Namiary na pomoc nawigacyjną przydadzą się również wtedy, kiedy punkty charakterystyczne terenu przesadnie charakterystyczne nie są. Przykładowo – polskie wybrzeże jest średnio urozmaicone. Raz straciwszy orientację można przez dłuższy czas zastanawiać się czy dana miejscowość do X czy Y. Te rozważania może zakończyć namierzenie radiolatarni – pojedyncza linia pozycyjna wystarczy jeśli przecina punkt terenu, który umiemy zidentyfikować (na przykład wybrzeże, dużą rzekę, ważną drogę itp).